今度は、dxdsでも使用したCreateDeviceのフックまでの流れを題材に、COM呼び出しやDLL呼び出しのトラップに関して一通り必要な処理を見ていきます。
1. 処理の流れ
2. DLL呼び出しへのブレークポイント生成
3. DLL呼び出し時の処理と返り値の取得
4. COM呼び出しのブレークポイント設定
5. CreateDevice呼び出し時の処理
6. NTDLL.DLLの注意点
7. まとめ
1. 処理の流れ
前回示したとおり、dxdsにおける最終目的はIDirect3Dインターフェースに対するCreateDevice呼び出しをトラップし、引数を書き換えることです。
まず、それに向けて何をすべきか簡単に考えて見ます。
とはいえ、それほど複雑なステップはありません。
CreateDeviceはDirect3D9オブジェクトに対するCOM呼び出しで実行されます。
また、そのDirect3D9オブジェクトはDLL呼び出しによりDirect3DCreate9関数で生成されます。
通常間に画面の設定などもありますが、それはCreateDeviceの引数の設定のためであり、CreateDevice呼び出しそのものに関わるのはこの2つだけですね。
gd3d = Direct3DCreate9(D3D_SDK_VERSION); gd3d->CreateDevice(***);
さて、dxdsでは内部的に4ステップを踏んでCreateDevice呼び出しをトラップしています。
- DLLロード時に、Direct3DCreate9にブレークポイント作成
- Direct3DCreate9呼び出し時に、Direct3DCreate9の終了位置にブレークポイント生成
- Direct3DCreate9終了時に、DirectX9オブジェクトを取得し、CreateDeviceにブレークポイント生成
- CreateDeviceで呼び出し時に、無事引数を書き換え
下3つはともかく、先頭は不要に思えるかも知れません。
「DirectX9オブジェクトが欲しいなら、最初からDirect3DCreate9の終了位置にブレークポイントを張れば?」と。
とはいえDirect3DCreate9の終了位置を最初から探し当てるのはなかなか難しいです。
ではなぜDirect3DCreate9自体にブレークポイントを張れば、終了位置がわかるか、については別途後述します。
それぞれ、ブレークポイント生成のために個別のテクニックが必要になります。
それでは1つずつ見ていきます。
2. DLL呼び出しへのブレークポイント生成
まず、Direct3DCreate9の呼び出しにブレークポイントを張ります。
Direct3DCreate9は単なるDLL呼び出しで行われるため、これが出来ればDLL呼び出し全般に応用可能です。
DLL呼び出しへのブレークポイント生成は、WaitForDebugEventがDLLロードイベントを返したときに行うのが良いでしょう。
DLLロードイベントが発生すると、DEBUG_EVENT構造体の中に共用体を用いて以下の情報が渡されます。
typedef struct _LOAD_DLL_DEBUG_INFO {
HANDLE hFile; // DLLのファイルハンドル
LPVOID lpBaseOfDll; // DLLの配置位置
DWORD dwDebugInfoFileOffset; // デバッグ情報の位置
DWORD nDebugInfoSize; // デバッグ情報のサイズ
LPVOID lpImageName; // DLLファイル名
WORD fUnicode; // ファイル名がUnicodeかどうか
}LOAD_DLL_DEBUG_INFO, *LPLOAD_DLL_DEBUG_INFO;
これらを用いて、Direct3DCreate9の位置を特定します。DLLファイル名の取得
まず、プログラムは動作を開始するとDLLが色々なものをロードするため、Direct3DCreate9と関係がないDLLのロードは無視する必要があります。
そこで、まずlpImageNameとfUnicodeを用いてファイル名を取得します。
dxds中の該当コードは以下の通り。これらはCodeZine プロセスデバッガを作ってみるを参考にしました。
static void ProcLoadDLL(HANDLE hDP, DEBUG_EVENT* pde) {
char temporary[1024], *pt, *pt2;
DWORD dwAccessByte;
WCHAR wcBuf[MAX_PATH];
LONG_PTR lpData;
//DLL名取得
ReadProcessMemory(hDP,pde->u.LoadDll.lpImageName,&lpData,sizeof(LONG_PTR),&dwAccessByte);
if(!lpData) return;
ReadProcessMemory(hDP,(void *)lpData,wcBuf,sizeof(WCHAR)*MAX_PATH,&dwAccessByte);
if(pde->dwThreadId,pde->u.LoadDll.fUnicode)
WideCharToMultiByte(CP_ACP,0,wcBuf,-1,temporary,255,NULL,NULL);
else lstrcpy((LPWSTR)temporary,(LPCWSTR)wcBuf);
lpImageNameはファイル名そのもののを示すのではなく、ファイル名の格納されたアドレスを格納します。そこで、まずReadProcessMemoryでそのアドレスをlpDataに取得します。
そしてさらにlpDataのアドレスからパスの最大長であるMAX_PATH文字分だけ文字列をコピーします。
ここで、fUnicodeが0ではない場合、ファイル名がUnicodeであることを示すので、ここではWideCharToMultiByteでマルチバイト文字に直しています。
Direct3DCreate9はd3d9.dllが提供しているAPIなので、上記ファイル名がd3d9.dllと一致するかチェックして先へ進みます。
なお、上記処理で得られるパス名は絶対パスなので注意が必要です。
DLL関数位置の取得
LOAD_DLL_DEBUG_INFO構造体はDLLの配置された位置をlpBaseOfDllに格納して返しますが、DLL内の個々の関数の位置は返しません。
このままだとDirect3DCreate9の位置がわからないので、ここで少しトリッキーな技を使います。
と言っても中身は単純で、自分でd3d9.dllをロードしてDirect3DCreate9の位置を取得し、d3d9.dllのロード位置からの差分を得ようというものです。
以下は、DLL名と関数名を与えるとDLLのロード位置からの差分を取得する関数です。
dxdsで用いたものから、エラー処理などを抜いて簡略化しています。
a2uはANSIからUnicode化する自作の手抜き関数なのであまり気にしないでください。
//DLL内における関数の相対位置を取得
LONG_PTR GetFunctionRelAddr(LPCSTR dllname,LPCSTR funcname){
LONG_PTR func;
HMODULE hDll;
MEMORY_BASIC_INFORMATION mbi;
hDll = LoadLibrary(a2u(dllname));
func = (LONG_PTR)GetProcAddress(hDll, funcname);
VirtualQuery((LPVOID)func, &mbi, sizeof (mbi));
func -= (LONG_PTR)mbi.AllocationBase;
FreeLibrary (hDll);
return func;
}
上記コードでは、まずLoadLibrary(MSDN)でDLLを自分でロードし、さらにGetProcAddress(MSDN)で関数の位置を取得しています。次に、このDLLの先頭位置を取得するためにVirtualQuery(MSDN)を用います。
これは余り使用する機会のないAPIなので機能を説明すると、対象アドレスに関するメモリの情報を取得できるというものです。
このAPIが返すMEMORY_BASIC_INFORMATION構造体(MSDN)のAllocationBaseメンバにDLLのロード位置が格納されます(正確にはこのDLL用に割り当てられたメモリ領域の先頭位置)。
よって、GetProcAddressで得た関数のアドレスと、このDLLのロード位置の差分を取ることが出来ます。
この関数で得た値を、DLLロードイベントで得られた情報のうち、lpBaseOfDllに加算すると、デバッギにおけるDLL内関数のアドレスが取得できます。
そこでこのアドレスに前回の要領でブレークポイントを設定し、実際に呼ばれるのを待ちましょう。
3. DLL呼び出し時の処理と返り値の取得
さて、上記処理で設定したDirect3DCreate9呼び出しのブレークポイントで無事ブレークしたとします。
次に行いたいことは、この関数の返り値であるIDirect3D9*の値の取得です。
ブレークした時点ではまだ関数は実行されていないので、次に実行後の位置にブレークポイントを張る必要があります。
とはいえ、Direct3DCreate9関数内のリターン処理にブレークポイントを張るのは無理でしょう。
この関数のサイズがわかるわけでもなく、この関数内のどこにリターン文があるかもわかりません。
ここでも小技を使って、関数の実行後にブレークポイントを張ります。
Direct3DCreate9の中身自体はわかりませんが、関数が終わって次に実行される処理はわかります。
すなわち、スタックに入っている関数のリターンアドレスです。
ここにブレークポイントを張れば、関数の実行直後にブレークします。
(このあたり、理解にはC言語における関数呼び出しの実装に関する知識が必要です。必要に応じて呼出規約やコールスタック(いずれもWikipedia)などを参照してください。)
この処理は非常に単純です。以下にdxdsの該当部分を記載します。
//スタックからリターンアドレス取得 ReadProcessMemory(hDP,(LPVOID)(LONG_PTR)con.Esp,&ret_addr,sizeof(DWORD),NULL); //Direct3DCreate9の呼び出し終了時のブレークポイント設定 MakeBreakPoint(hDP,pde,&_bp,ret_addr);
前回説明したブレークポイントの処理において、GetThreadContextを使ってレジスタの値を取得する処理を紹介しました。
そこで、まずReadProcessMemoryを使ってESPレジスタの示す位置から4byte読み出すだけです。
そこにリターンアドレス(ret_addr)が格納されています。あとはそこにブレークポイントを張るだけです。
そしたら処理を再開して、Direct3DCreate9の処理が終わるのを待ちましょう。
4. COM呼び出しのブレークポイント設定
さて、先の処理で仕込んだDirect3DCreate9のリターンアドレスでブレークしたとします。
まず、IDirect3D9*の値ですが、Windowsの場合関数の返り値はEAXレジスタに格納されています。
よって、GetThreadContextでレジスタ値を得ればIDirect3D9*の値は取得できます。
ここで得られるIDirect3D9*の値から、CreateDeviceメンバ関数の位置を取得しましょう。
前回示したd3d->CreateDevice(***)の呼び出しの処理ですが、コンパイラの設定によっては以下の様にコンパイルされます。
(途中の引数処理省略) mov eax,dword ptr [d3d (647AF0h)] // eax = d3d mov ecx,dword ptr [eax] // ecx = *eax mov edx,dword ptr [d3d (647AF0h)] // edx = d3d push edx // C++のメンバ関数呼び出しのthis(=d3d)設定 mov eax,dword ptr [ecx+40h] // eax = *(ecx + 0x40) call eax // eaxをコールつまり、IDirect3D9*型の変数に対し、そのポインタの指すアドレスの値を取得し、0x40を足したアドレスに関数のアドレスが格納されているわけです。
まとめると*(*d3d + 0x40)ですね。
dxdsの中では以下のようなコードを使用しています。(エラー処理などを消し、コメントを一部追加しています)
これで、CreateDeviceにブレークポイントを張れます。
//Direct3DCreate9の返り値であるIDirect3D9*の値をEAXレジスタから取得 d3d_addr = con.Eax; //この返り値が指すアドレスの中身をd3d_vtbl_addrに取得 ReadProcessMemory(hDP,(LPVOID)d3d_addr,&d3d_vtbl_addr,sizeof(DWORD),NULL); //上記値に0x40を足したアドレスを参照し、関数のアドレスをd3d_func_addrに取得 ReadProcessMemory(hDP,(LPVOID)(0x40 + d3d_vtbl_addr),&d3d_func_addr,sizeof(DWORD),NULL); //得られたアドレスにブレークポイントを張ります。 MakeBreakPoint(hDP,pde,&_bp,d3d_func_addr);
COMオブジェクトのメンバ関数のアドレス取得
これで目的であるCreateDevice関数へのブレークポイントは張れるわけですが、IDirect3D9*からCreateDeviceのアドレスを求める過程が気持ち悪いですね。いきなり0x40なんてマジックナンバーが出てきますし。
そこで、一応ここでその理由を説明しておきます。
まず、DirectXに出てくる諸オブジェクトはCOMオブジェクトです。
COMオブジェクトとは何か?についてはDirectX9 SDKにCOM オブジェクトとは(MSDN)に説明されていますが、正直これだとよくわかりません。
ただ、このページの最後を見ると「メソッドを呼び出すときは、C++ のメソッドへのポインタを呼び出すときと同様な構文を使う」と書いてあります。
よって、IDirect3D9*のCreateDeviceの呼び出しは、COMとか気にせず単にC++の呼び出し規約に則っていると考えてOKです。
よって、この章の以降の内容はC++のメンバ関数呼び出しを理解している人は読む必要がありません。
まず、SDKからIDirect3D9の定義を見てみます。(関係のない部分は省略。)
DECLARE_INTERFACE_(IDirect3D9, IUnknown)
{
STDMETHOD(QueryInterface)(THIS_ REFIID riid, void** ppvObj) PURE;
STDMETHOD_(ULONG,AddRef)(THIS) PURE;
STDMETHOD_(ULONG,Release)(THIS) PURE;
STDMETHOD(RegisterSoftwareDevice)(THIS_ void* pInitializeFunction) PURE;
STDMETHOD_(UINT, GetAdapterCount)(THIS) PURE;
STDMETHOD(GetAdapterIdentifier)(THIS_ UINT Adapter,DWORD Flags,D3DADAPTER_IDENTIFIER9* pIdentifier) PURE;
STDMETHOD_(UINT, GetAdapterModeCount)(THIS_ UINT Adapter,D3DFORMAT Format) PURE;
STDMETHOD(EnumAdapterModes)(THIS_ UINT Adapter,D3DFORMAT Format,UINT Mode,D3DDISPLAYMODE* pMode) PURE;
STDMETHOD(GetAdapterDisplayMode)(THIS_ UINT Adapter,D3DDISPLAYMODE* pMode) PURE;
STDMETHOD(CheckDeviceType)(...) PURE;
STDMETHOD(CheckDeviceFormat)(...) PURE;
STDMETHOD(CheckDeviceMultiSampleType)(...) PURE;
STDMETHOD(CheckDepthStencilMatch)(...) PURE;
STDMETHOD(CheckDeviceFormatConversion)(...) PURE;
STDMETHOD(GetDeviceCaps)(...) PURE;
STDMETHOD_(HMONITOR, GetAdapterMonitor)(THIS_ UINT Adapter) PURE;
STDMETHOD(CreateDevice)(...) PURE;
};
マクロを使っていますが、DECLARE_INTERFACE_は単にstruct、STDMETHODは仮想関数をマクロでラップしているだけです。と言う訳で、このクラスは全メンバ純粋仮想関数なので、抽象クラスとなります。
このクラスはメンバ変数を持たないのですが、sizeof(IDirect3D9)を取ると4byteと返ります。
なぜ0じゃないのかについて、メモリ上の構造を元に説明します。
以下の図はVisualC++でIDirect3D9をコンパイルしたときのメモリ構造です。
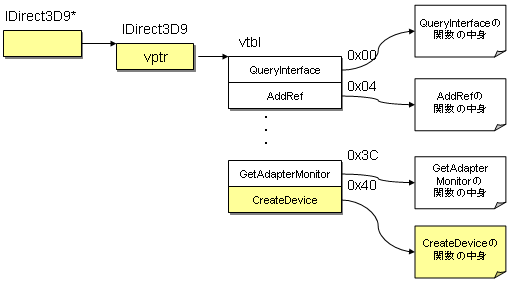
IDirect3D*は当然IDirect3Dを指すとして、IDirect3Dの4byteはvptrというデータを持っています。
このvptrはコンパイラが内部で生成する(プログラム作成者に見えない)vtblというデータの位置を示します。
vtblには、このクラスが持つ仮想関数のアドレス一覧を格納しています。
このとき、上記IDirect3D9の定義を見ると、CreateDeviceは17個目のメンバ関数です。
なので、1関数あたり4byteで配置すると、17関数目のものは0x40に格納されます。
よって、IDirect3D9*の変数d3dに対し、*d3dでvptrの場所を取得し、*(vptr+0x40)で無事CreateDeviceの位置がわかりました。
5. CreateDevice呼び出し時の処理
これで、ようやくCreateDeviceの呼び出しをブレークすることが出来ました。
元々の目的はここの第1引数を書き換えることです。
ここまでの知識で引数の書き換えに必要なものは揃っていますので簡単に説明。
まず、第1引数がどこにあるのかを知る必要があります。
前回出したCreateDeviceの逆アセンブル結果を見てみます。
push offset d3ddev (644AB8h) # &d3ddev push edi # &PP push 40h # D3DCREATE_HARDWARE_VERTEXPROCESSING push esi # hwnd push 1 # D3DDEVTYPE_HAL push 0 # D3DADAPTER_DEFAULT。これがスクリーン指定。 push eax # this = d3d call edxWindows環境(32bitに限る)では、スタックに引数が逆順に積まれていることがわかります。
目的の第1引数はpush 0の部分で、その後C++のthisに相当するオブジェクトのポインタ自体がpushされ、callされています。
よって関数呼び出しの直後、ESPの示す場所にリターンアドレス、4バイト後ろにthis、もう4バイト後ろに第1引数があることになります。
以下はdxdsのコードです。esp+8バイトの位置の値を書き換えることで第1引数の書き換えを完了しました。
ReadProcessMemory(hDP,(LPCVOID)(esp+0x8) ,&TmpAdapter,sizeof(UINT),&len); //この間でTmpAdapterに格納された値をいじる WriteProcessMemory(hDP,(LPVOID)(esp+0x8) ,&TmpAdapter,sizeof(UINT),&len);
これでようやく目的のCreateDevice第1引数書き換えが終了です。
何度もブレークを張りましたが、なんとかたどり着きましたね。
6. NTDLL.DLLの注意点
実際にここまでのコードでCreateDeviceの引数を書き換えようとすると、妙なことに気がつきます。
前回もちょろっと触れたように、ntdll.dllがなぜかブレークしてくることです。
調べたところ、ntdll.dll内のDbgBreakPointという関数がブレークを発生させます。
前回述べたように、見知らぬブレークポイントは無視してやればよいのですが、とはいえ全部無視というのもなんだか怖いです。
本当にプログラマのミスで変な位置にブレークポイントを仕込んでしまっているだけの可能性もありますしね。
そこで、DbgBreakPointからの呼び出しだけちゃんと見て無視することにしましょう。
これはここまでの知識で解決可能です。
まず、DbgBreakPointの位置は、d3d9.dllからDirect3DCreate9の位置を求めたのと同じように、ntdll.dllをロードしてDbgBreakPointをGetProcAddressしてやればよいです。
下記の通りntdll.dllを見ると、DbgBreakPointは最初のコードがint 03になります。よって、GetProcAddressで得たアドレス=int 3でブレークするアドレスです。
CC int 03 C3 ret
これでこのアドレスだけ意図的に無視してやるようにすれば、ntdll.dllの余計なブレークを気にする必要がなくなります。
(なんでntdll.dllがDbgBreakPointでわざわざブレークするのかは不明です。ご存知の方教えてください…)
7. まとめ
前回はデバッグ系APIを使ってブレークポイントの処理を説明しました。
今回は、dxdsを題材に、DLL内関数でのブレークやCOMのメソッド呼び出しのブレークを行い、引数の書き換えを行う部分まで説明しました。
ここまでの知識を応用すれば、既存のアプリケーションの処理を色々いじれるようになりそうですね(^^;
参考資料
[1] プロセスデバッガを作ってみる(CodeZine)